Wir sind eine studentische Arbeitsgemeinschaft, die seit August 2008 autonom fahrende Fahrzeuge im Maßstab 1:10 entwickelt. Die Fahrzeuge verfügen über eine Fahrbahn- und Objekterkennung mithilfe von Kamera und Sensoren, die eine Hindernis- und Kreuzungserkennung, sowie eine Parklückennavigation ermöglicht. Sowohl Hard- als auch Software werden immer wieder weiterentwickelt, um in Wettkämpfen mit Teams anderer Hochschulen und Universitäten mithalten zu können.
Wer kann mitmachen?
Alle Studierende der Ostfalia sind bei uns herzlich Willkommen, ungeachtet von Studiengang und Vertiefungsrichtung. Solange ihr Interesse und Motivation mitbringt, sind keine besonderen Vorkenntnisse nötig.
Was bieten wir?
Der Ostfalia-Cup bietet allen Studierenden die Möglichkeit, erlerntes Wissen aus dem Studium anzuwenden und zu vertiefen, oder auch mal was ganz anderes auszuprobieren. Gerne betreut das Ostfalia-Cup Team studentische Projekte, die sich unter Umständen beim Studium anrechnen lassen. Sprecht uns dazu gerne persönlich an. Beim Ostfalia-Cup fallen Arbeiten in allen möglichen Bereichen an, sowohl technischer Natur, wie der Programmierung, Platinendesign und 3D-Modellierung und -Druck, als auch Aufgaben wie die Wartung dieser Webseite, Projektmanagement oder Social Media.
Wo findet man den Ostfalia-Cup?
Wir haben unsere Arbeitsräume und Teststrecke an der Fakultät Informatik. Wir befinden uns im Gebäude am Exer 2d im Dachgeschoss. Hier haben wir einen großen Arbeitsraum mit Schreibtischen und Monitoren, sowie einer Sofa Lounge zum entspannten Meeting. Nebenan ist unsere kleine Werkstatt in der wir unsere Fahrzeuge warten und Testaufbauten herstellen. Zum Testen unserer Fahrzeuge haben wir dann noch unsere Teststrecke mit Leitstand. Besucht uns gerne, alle Infos findet Ihr hier.
Mitmachen
Wenn du mitmachen willst, komm gerne bei uns in der Fakultät Informatik in Wolfenbüttel Am Exer 2d, Raum 283 vorbei, wir haben immer montags ab 16.00 Uhr unsere Working Hour. Oder schreib uns eine Email an cup(at)ostfalia.de.
Unser kleines Team bietet die perfekte Umgebung um viele neue Eindrücke zu sammeln!Bei uns kannst du Team- und Projektarbeit erleben, mitwirken und etwas bewegen (und zwar nicht nur unser Auto). Die Arbeit im Ostfalia-Cup ist vielseitig. In vielen Bereichen kannst du dein Wissen vertiefen, dir neues Wissen aneignen und deine Fähigkeiten gewinnbringend einbringen.
Egal ob du lieber programmierst, an Hardware tüftelst oder anderen unsere Fahrzeuge erklärst, hier findest du etwas was dir liegt und dich interessiert, vielleicht findest du auch deine neue Leidenschaft!
Themen
Gerne kannst du mit deinen eigenen Ideen rund ums Thema "automatische und autonome Systeme" bei uns mitmachen, aber falls du noch ein paar Anregungen brauchst haben wir hier ein paar Bereiche, mit denen wir uns beschäftigen:
(Embedded) Programming
Linux
Softwaremodellierung
Elektrotechnik
Klassische und ML-basierte Bildverarbeitung
Projektmanagement
Regelungstechnik
Rechnerstrukturen
Verteilte- und Vernetzte Systeme
Onboard-Netzwerke (CAN, I2C, Ethernet)
Simulation
Fahrerassistenzsysteme
Testmanagement
Social Media / Pressearbeit
Blog
Erstibegrüßung am 22. September 2025
31.07.2025Geschrieben von: Lars K.
Wir begrüßen alle neuen Studierenden aller Fakultäten zum Wintersemester 2025/26. In einem bunten Rahmenprogramm sind auch wir mit einem Stand am Hauptgebäude am Standort Wolfenbüttel auf der Aktionsmeile (auch als Markt der Möglichkeiten bekannt) im Glasgang bei der Cafeteria am Montag, 22.09.2025 von 10.00 Uhr - 13.00 Uhr dabei! Ihr könnt hautnah unseren aktuellen Fahrzeuge erleben und auch gerne "unter die Haube" schauen. Wir zeigen Euch auch unseren Prototypen der neuen Plattform. Ihr könnt mit uns gerne über alles Mögliche sprechen. Entweder über die Fahrzeuge oder die AG, aber auch über das Studium an der Ostfalia. Weitere Infos zum Programm der Erstibegrüßung findet Ihr auf der offiziellen Webseite. Wir freuen uns auf Euch!
Campustag 2025
24.05.2025Geschrieben von: Lars K.
Herzlich Willkommen in der Ostfalia! Der Campustag ist eine Veranstaltung der offenen Tür, um der Bevölkerung zu zeigen, an welchen Projekten und Themen die Mitarbeitenden und Studierenden Ostfalia forschen und arbeiten. Auch wir präsentieren unsere AG Arbeit und zeigen allen Interessierten unsere Fahrzeuge und erklären die wissenschaftlichen Themen, die mit dieser Arbeit verbunden sind. In diesem Jahr haben wir wieder eine kleine Rennstrecke mitgebracht und zeigen was wir unserem Fahrzeug mit Hilfe von Software beigebracht haben. Dies sind beispielsweise die Fahrmanöver wie der Strecke folgen, Einparken, Überholen und vieles mehr. Dazu gehört dann auch zu zeigen, wie wir mit Hilfe von einer vielzahl an Sensoren die Umwelt wahrnehmen und auf äußere Einflüsse reagieren. Das Interesse war zu unserer Freude in diesem Jahr wieder besonders groß und wir haben mit vielen Leuten sprechen können. Einige Besuchende - insbesondere die jüngsten unter unseren Gästen - haben sich einfach nur über das Auto und seine Fähigkeiten gefreut, andere kamen auch mit komplexeren Fragen zu uns, beispielsweise über das Thema autonomes Fahren im realen Straßenverkehr. Nach dem Ende des Campustag Fest haben wir uns noch mit einigen Kolleg*innen im Innenhof des Hauptcampus getroffen um bei einem kühlen Getränk den DJ-Künsten einiger Professor:innen und Mitarbeitenden zu lauschen.
Lars K. erklärt interessierten Besuchenden unser Fahrzeug und gibt spannende Einblicke in die AG Tätigkeiten. Foto: Philipp Ziebart/Ostfalia
Podium auf der CAuDri Challenge!
18.05.2025Geschrieben von: Lars K.
Ein Reisebericht zur Exkursion nach Stuttgart
Die Reise
Endlich wieder ein Wettkampf. Nach viel Planung und Vorbereitung ging es dieses Jahr endlich wieder zu einem Wettbewerb und zwar nach Stuttgart. Nach dem der Carolo-Cup der TU Braunschweig nicht mehr fortgesetzt wird, hat sich der CAuDri e.V. aus ehemaligen CC-Teams gegründet und betreibt nun den geistigen Nachfolger - die CAuDri Challenge(externer Link) nun schon bereits zum dritten Mal. Da wir bei den ersten beiden Veranstaltungen keine Möglichkeit hatten teilzunehmen, haben wir uns dieses Jahr richtig gefreut dabei zu sein. Los ging es aufgrund der langen Anreise bereits am Donnerstag im Konvoi nach Süddeutschland. Bei schönstem Wetter sind wir vergnügt in Stuttgart angekommen und freuten uns auf die runderneuerten Hotelzimmer. Müde von der langen Fahrt ging es nach einem gemeinsamen Abendessen, es gab leckere Hamburger, recht früh ins Bett.
Eines unserer schönen Hotelzimmer. Foto: Lars K.
Der Wettbewerb - Freitag
Am Freitag ging es dann zur DHBW Stuttgart ins Technik Gebäude, Heimat der Smart Rollerz. Nach einem ersten Rundgang durch das imposante Gebäude haben wir in einem Nebenraum die Tische für die Teams hergerichtet und uns für den zweitägigen Wettkampf eingerichtet. Im Anschluss daran haben wir uns sogleich unsere Fahrzeuge geschnappt und sind die ersten Testrunden gefahren, damit wir die Einstellungen der Fahrzeuge auf die neue Umgebung anpassen können. Nebenbei haben wir dann auch die anderen Teams begrüßt und angefangen mit denen zu fachsimpeln und zu schnacken. In diesem Jahr waren die Teilnehmer recht überschaubar, neben unserem Team und den Smart Rollerz war noch die Teams Spatzenhirn aus Ulm und das Team KITcar aus Karlsruhe vor Ort. Nach einem langen Tag mit Tests, Vorbereitungen auf den kommenden Wettkampftag viel das Abendessen am Freitag etwas mau aus und es gab lediglich eine kleine Mahlzeit beim Burger King. Unsere Teammates Boby, Felix und Katharina sind dann allerdings noch in die Stuttgarter Innenstadt, um sich mit den anderen Teams zu einem gemeinsamen Umtrunk zu treffen.
Die Rennstrecke. Im Hintergrund sprechen Lars K. und Mark vom Team KITcar über ein geplantes Interview. Foto: Katharina
Der Wettbewerb - Samstag
Und schon war es Samstag, Wettkampftag. Am Vormittag gab es noch die Gelegenheit letzte Tests und letzte Änderungen zu machen. Und dann ging es ab Nachmittag mit leichter Verspätung los. Neben den Teammitgliedern waren auch eine Reihe von Studierenden, Mitarbeitenden und Personen aus der Bevölkerung vor Ort. In der ersten Disziplin, dem Freedrive konnten wir gut Punkten, mussten aber feststellen dass auch die anderen Teams gut dabei waren. Team Spatzenhirn war wie in der Vergangenheit auf dem Track sehr souverän unterwegs, aber auch KITcar konnte einige Punkte einfahren, und das obwohl sie in diesem Jahr ihre neue Fahrzeuggeneration an den Start gebracht haben, bei der noch viele kleine Fehler im Detail stecken und das Fahrzeug erst im zweiten Anlauf eigenständig aus der Startbox fahren konnte. Lediglich die Smart Rollerz haben einen rabenschwarzen Tag erlebt. Auch sie haben eine recht neue Plattform an den Start gebracht. Leider hat sich in deren Fahrzeug ein Bauteil erhitzt und die Karosserie geschmolzen! Da in erster Reaktion ein Akkubrand befürchtet wurde, ist das Fahrzeug unverzüglich aus dem Gebäude gebracht worden und der Versuch wurde beendet. Später wurde entschieden den Zweitversuch und die zwei weiteren Disziplinen nicht anzutreten. Bei der zweiten Disziplin, dem Obstacle Evasion Course, konnten wir ebenfalls wieder einige Punkte gutmachen, insbesondere das Einparken klappte ohne Probleme. Beim Überholen eines statischen Hindernisses fand unser Fahrzeug aber nicht mehr zurück in die rechte Fahrbahn und wir mussten händisch eingreifen. Auch das dynamische Hindernis haben wir nicht korrekt erkannt und sind diesem hinten aufgefahren, beides hat wertvolle Punkte gekostet. Auch hier konnte am Ende das Team Spatzenhirn die Challenge für sich entschieden, wenn auch ohne Parkmanöver. Team KITcar hatte ebenfalls wieder Probleme eigenständig aus der Startbox zu fahren und konnte keine Punkte erzielen. Die dritte Challenge, den Navigation Course, wurde in diesem Jahr leider von keinem Team angetreten. Trotz einiger Fehler war die Teilnahme an der diesjährigen CAuDri Challenge für uns ein toller Erfolg und wir wurden auch seitens der anderen Teams zu unserem 2. Platz gleich im ersten Jahr beglückwünscht. Unsere Glückwünsche gehen ebenfalls an alle anderen Teams, insbesondere an die Gewinner aus Ulm, und natürlich an das Orga-Team des CAuDri e.V. für die Veranstaltung. Nach der Veranstaltung haben wir unsere Sachen alle wieder ins Auto geräumt und auch beim Abbau geholfen, wir freuen uns auf das kommende Jahr und eine erneute Teilnahme, dann vielleicht schon mit unserer neuen Fahrzeuggeneration.
Das Team Ostfalia-Cup auf der diesjährigen CAuDri Challenge. Foto: Yannik Süßmuth/CAuDri e.V.
Das Team
Mitglieder
Tiberius
Student
Katharina
Studentin
Boby
Student
Roland
Student
Felix
Student
Lars K.
Senior Student
Florian
Betreuung
Lars D.
Betreuung
Ehemalige Mitglieder
Basti T.
Daniel L.
Lennart P.
Lukas K.
Vanessa N.
Marian C.
Marc F.
Nils T.
Günter K.
Jonathan M.
Christian K.
Daniel N.
Jacky H.
Dirk L.
Alexander H.
Tobias F.
Die Fahrzeuge
Unsere Fahrzeuge haben wir mit dem Ziel entwickelt, dass sie selbstständig in der Lage sind, verschiedene Herausforderungen auf unbekannten Straßen zu meistern. Dazu haben wir sie mit verschiedenen Sensoren ausgestattet, mit denen sie die Umwelt wahrnehmen. Um selbstständig agieren zu können, besitzt jedes Fahrzeug über verschiedene Computer, welche Sensordaten auswerten, Pläne berechnen und am Ende die Motoren steuern.
Ab und zu entwickeln wir ein Fahrzeug von Grund auf neu, sei es weil wir etwas Neues probieren wollen, oder uns die Ersatzteile ausgegangen sind. Aber auch sonst entwickeln und verbessern wir immer wieder die bestehende Hard- und Software, auch wenn das Fahrzeug auf den ersten Blick noch so aussieht wie im vorherigen Jahr.
Da immer mal etwas kaputtgehen kann, setzen wir immer auf die Strategie, mehrere gleiche Fahrzeuge zu fertigen. Im Wettbewerb können wir so schnell ein Fahrzeug austauschen, in der Lehrveranstaltung können mehrere Gruppen gleichzeitig an jeweils einem Fahrzeug arbeiten.
202x
Die Neuentwicklung eines weiteren Fahrzeugs ist in vollem Gange. Wir hoffen dass wir hier bald neue Bilder und Infos veröffentlichen können.
2024
Weiterentwicklung des 2020er-Modells. Nahezu jedes Bauteil wurde in der Zwischenzeit angepasst und verbessert. Und nun haben wir drei davon! V.l.n.r.: MUG, Ballisitc und CUP
2020
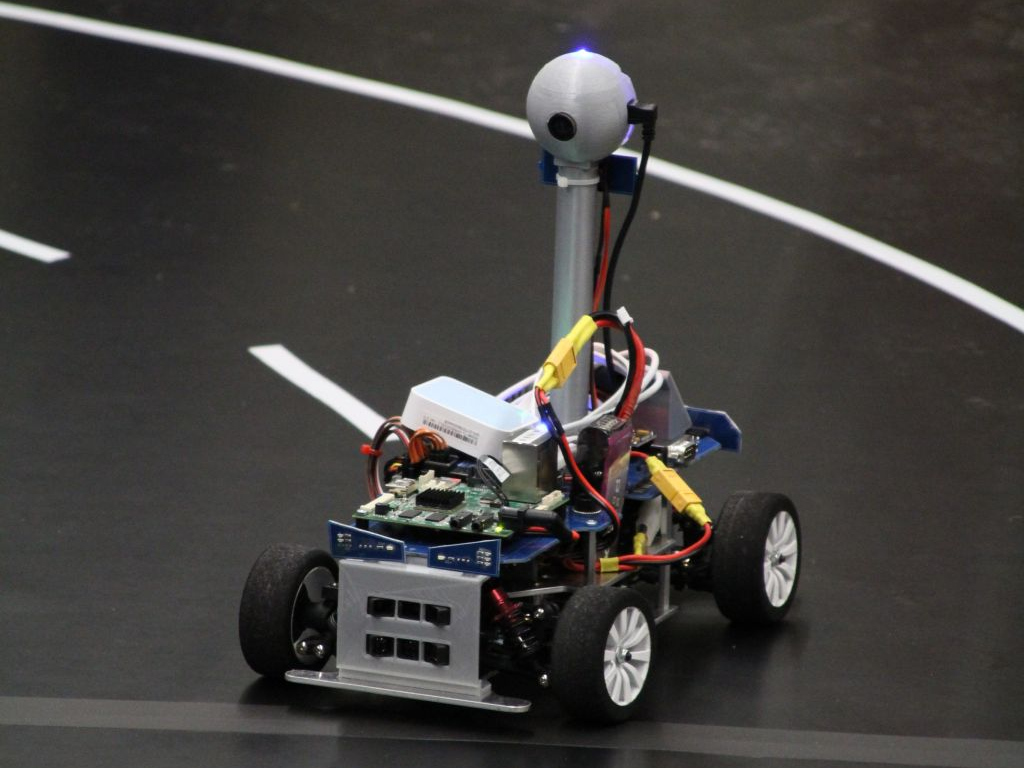
Das ist CUP - Ein von Grund auf neu entwickeltes Fahrzeug mit den meisten Teilen aus dem 3D Drucker.
Die vier Räder werden von einem 21.5T BLDC Motor angetrieben, welcher sowohl besonders langsam drehen kann, für präzise Fahrmanöver, als auch schnell genug für ein paar Donuts auf der Teststrecke.
Sowohl Vorder- als auch Hinterachse sind lenkbar, um einen besonders kleinen Wendekreis zu erreichen und auch in enge Parklücken zu passen. Die Umdrehung der Räder wird von vier Sensoren überwacht, welche direkt in den Rädern verbaut sind und über das Board-Netz immer die aktuelle Geschwindigkeit melden.
Mit der neuen Kamera und dem 120° Objektiv erkennt das Auto die Straße, Schilder und auch Fußgänger auf der anderen Straßenseite. Durch die im Kameraturm verbaute IMU wird das Bild in der Software auch noch stabilisiert.
Berechnet wird alles auf der Nvidia Jetson TX2, welche wir auf einem besonders kleinen Carrier-Board in die neue Karosserie integriert haben. Unterstützt wird sie von 4 Steuergeräten, welche im Auto verteilt sind und über einen CAN-Bus miteinander kommunizieren.
2019
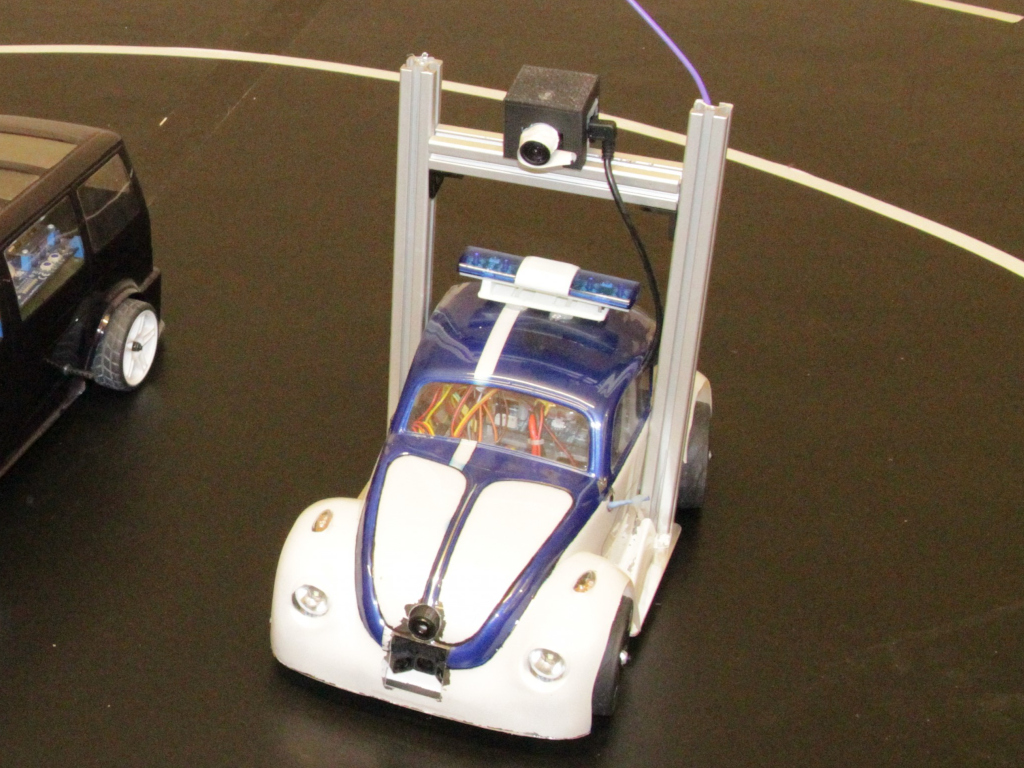
Weiterentwicklung des 2018er-Modells, nun mit einer Nvidia Jetson TX2 als Hauptrechner. Das Karosserie-Design hatten wir schon vor dem Cybertruck!
2018
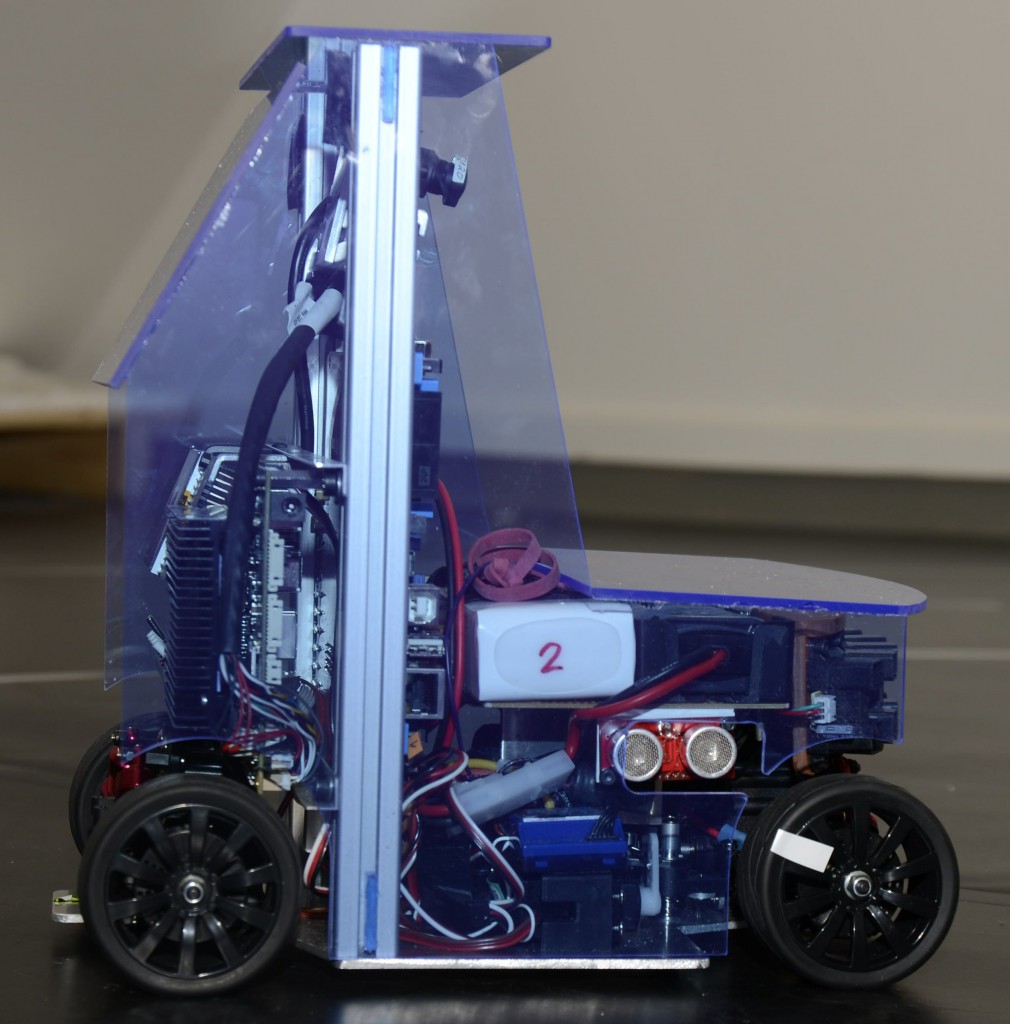
Während der Unterbau mit Motor und Lenkung vom 2016er-Modell übernommen wurde, haben wir die ganze obere Schicht durch eine große Platine ersetzt, welche die verschiedenen Mikrocontroller und unseren Hauptrechner, den NXP I.mx6, miteinander verbindet.
2016
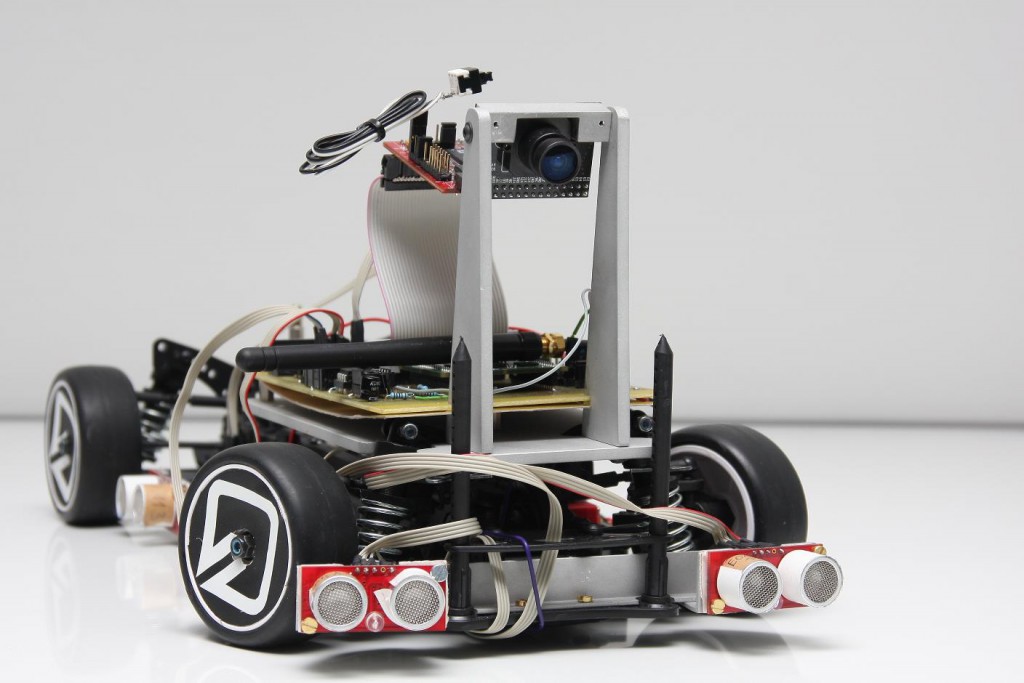
Eine deutliche Verschlankung zum 2014er-Modell, jetzt mit Odroid XU3 als Hauptrechner.
2014, 2012
Mehr als ein paar Bilder konnten unsere Archäologen leider noch nicht über diese historischen Generationen als Licht bringen.



 Tiberius
Tiberius
 Katharina
Katharina
 Boby
Boby
 Roland
Roland
 Felix
Felix
 Lars K.
Lars K.
 Florian
Florian
 Lars D.
Lars D.